|
Mattia D'Urso I am a PhD student in Prof. Friedrich Fraundorfer's group at the Institute for Visual Computing (IVC) at Graz University of Technology, Austria. Previously, I gained professional experience at the Canva office in Vienna and at Infineon Technologies in Villach, Austria. I hold a joint Master's double degree from the University of Klagenfurt and the University of Udine, where I also completed my Bachelor's degree. |

|
ResearchMy research focuses on 3D Computer Vision and Machine Learning, with a specific interest in Pose Estimation and Structure from Motion (SfM). |
|
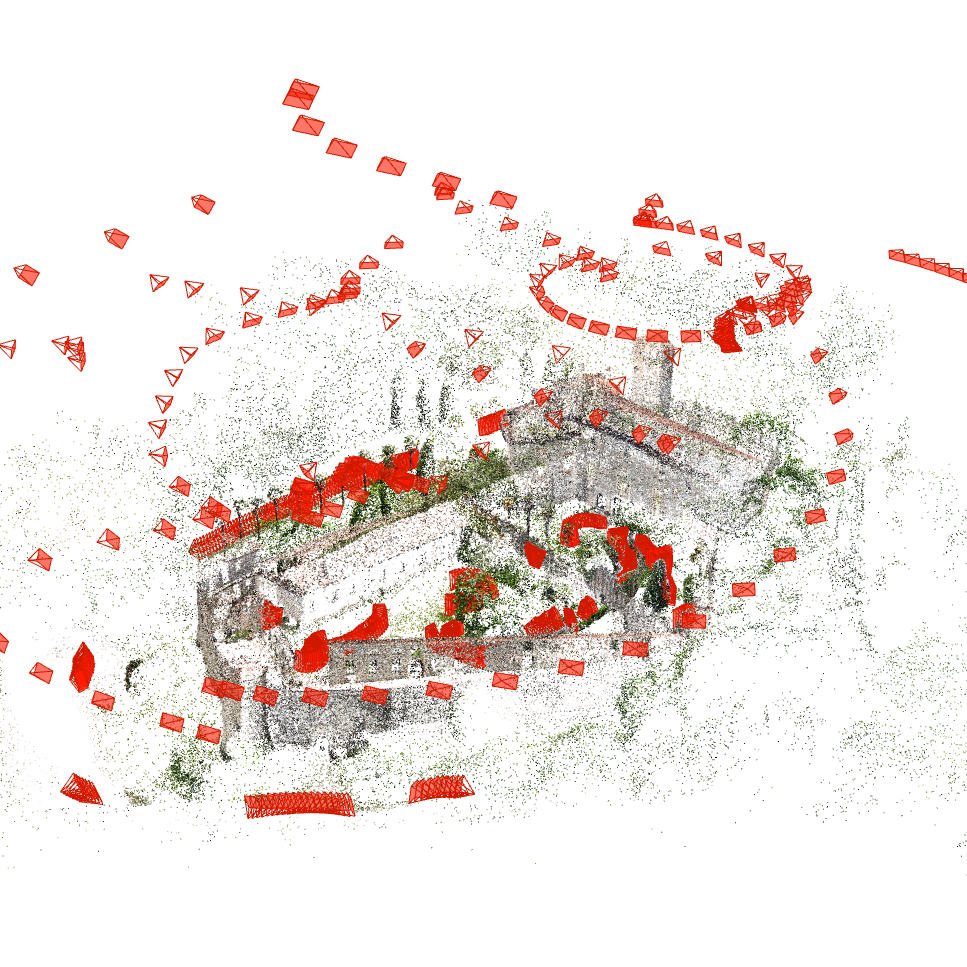
TerraSky3D: Multi-View Reconstructions of European Landmarks in 4K
3DMV at CVPR Workshop 2026
TerraSky3D is a high-resolution 4K dataset of European landmarks comprising over 50,000 images across 150 scenes, specifically designed to bridge the modality gap between ground-level and aerial perspectives for 3D reconstruction. It provides curated camera poses and dense depth maps. |
|
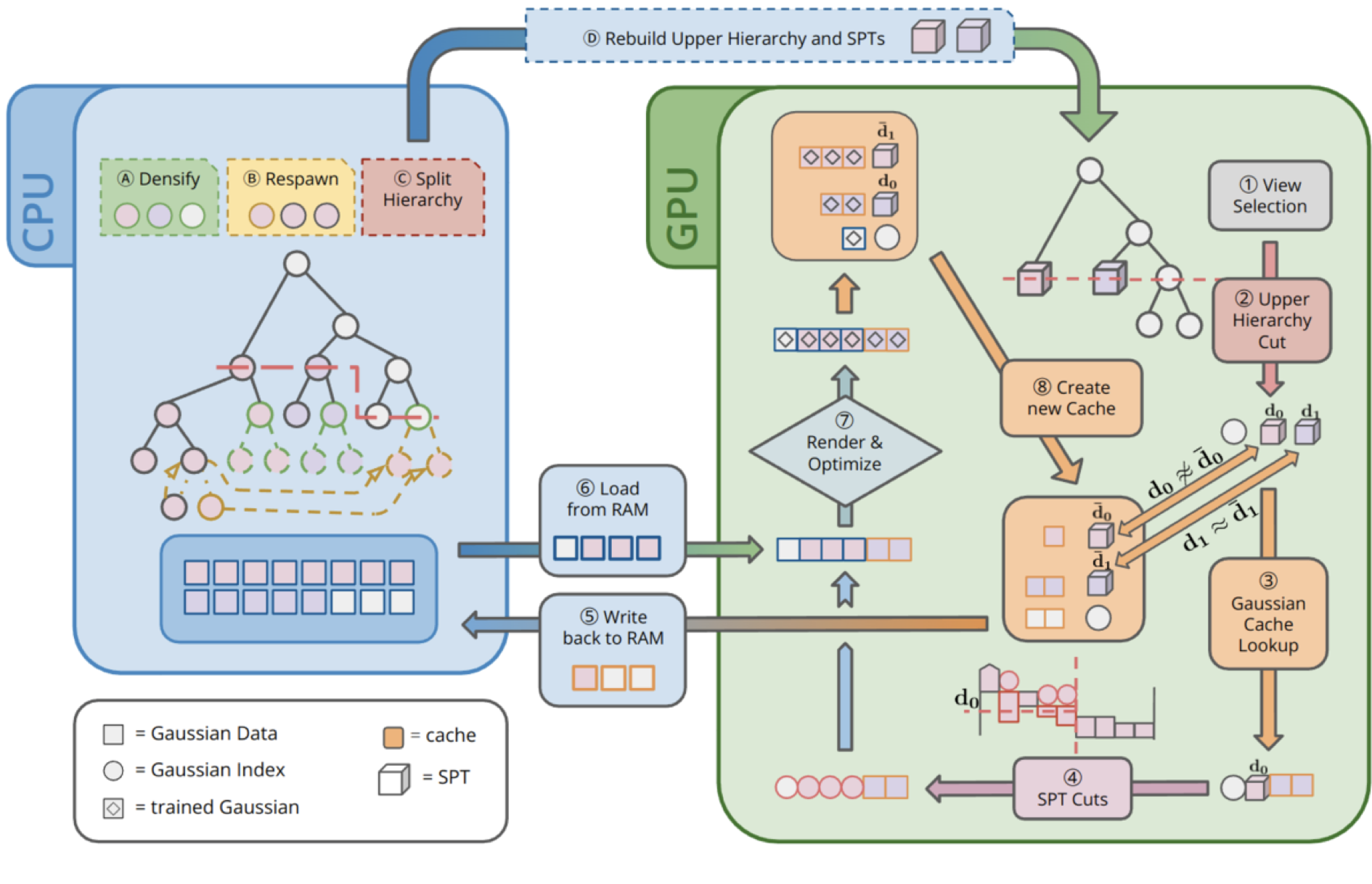
A Lod of Gaussians: Unified Training and Rendering for Ultra-Large Scale Reconstruction with External Memory
SIGGRAPH 2026
A LoD of Gaussians enables the reconstruction and interactive visualization of ultra-large-scale scenes by replacing traditional scene partitioning with a dynamic, out-of-core Level-of-Detail framework. |
|
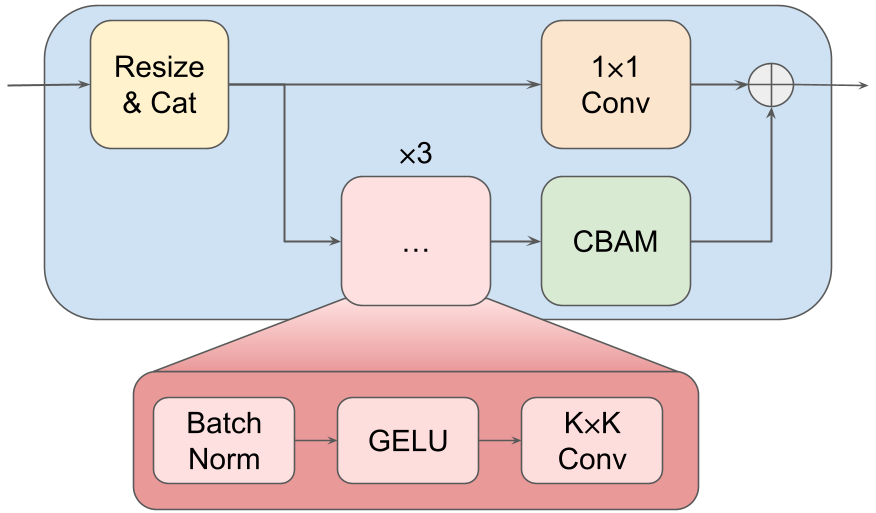
SANDesc: A Streamlined Attention-Based Network for Descriptor Extraction
3DV 2026
SANDesc is a descriptor module that can be trained on top of any existing keypoint detector. It significantly improves pose estimation performances on high-resolution images. |
|
|
Pytorchgeonodes: Enabling Differentiable Shape Programs for 3D Shape Reconstruction
CVPR 2025
PyTorchGeoNodes is a differentiable module that enables reconstruction of 3D objects and their semantic parameters using interpretable shape programs. |
|
Template adapted from Jon Barron. |